ISSN : 0975-3710
EISSN : 0975-9107
LOGHAVI M.1*, MAHARLOUIE M.M.2, KAMGAR S.3
1Shiraz University, Shiraz, Iran.
2Shiraz University, Shiraz, Iran.
3Shiraz University, Shiraz, Iran.
* Corresponding Author : loghavi@shirazu.ac.ir
Received : - Accepted : - Published : 09-03-2012
Volume : 4 Issue : 2 Pages : 190 - 195
Int J Agr Sci 4.2 (2012):190-195
DOI : http://dx.doi.org/10.9735/0975-3710.4.2.190-195
Conflict of Interest : None declared
Acknowledgements/Funding : Authors should express their acknowledgment toward Dr. S. M.
Nassiri and Professor Jonathan Chaplin for their guidance and
helps and also Shiraz University for its technical supports
Crop yield map is a useful means to quantify yield variations within the fields and to provide a scientific basis for implementing site -specific crop management strategies. This research explores the feasibility of developing a new silage yield monitoring system by employing a new mass flow sensor based on using the momentum of chopped material impacting a pivoted plate loaded by a retractable spring installed at the end of a chopper discharge spout. A precise rotary potentiometer was used to measure the degree of pivoted plate rotation. To save and process the output voltage of the potentiometer, a programmable circuit comprising of AVR microcontroller ATMEGA series and MAX 232 microchip was used and the output data was sent to a portable computer for further processing. To calibrate the output signal of the sensor versus instantaneous chopped material flow rate, the chopper was fed artificially with predetermined mass flow rates of 6, 8 and 10 kg s-1 of silage corn at five replications for each feeding rate. The results of statistical analysis showed high correlation between degrees of the pivoted-plate rotation and instantaneous feed rates with adjusted R2 of 0.98. To evaluate the accuracy of mass flow rate estimation, a platform scale weighing system was used during the field tests. The statistical analysis did not show any significant difference between sensor mass flow rate estimation and platform scale weighing system output. By using the resulted calibration equation, yield map of a silage cornfield was generated.
precision farming, yield monitoring, chopper, silage corn, pivoted-plate sensor
One of the most important topics in precision farming is preparing yield maps for grain or non-grain crops. Crop producers use these maps to find the existence of problems hindering their access to the full potential yield and profit in their fields. The most complicated part of yield map technology is determining the mass flow rate (mass/time) of the harvested crop during harvesting operations. Yield sensors as reported by Loghavi and Almaee (2009) are based on a wide variety of measurement methods including paddle wheel volume flow sensor (Schueller et al., 1987; Searcy et al., 1989; Schnug et al., 1993), pivoted auger (Wagner and Schrock, 1989), capacitance sensor (Stafford et al., 1991), ultrasonic sensor (Klemme et al., 1992), strain gage-based impact sensor (Borgelt, 1993), elevator-based flow sensor (Howard et al., 1993), gamma ray sensor (Stafford et al., 1991; Massey Ferguson, 1993), infrared sensor (Hummel et al.,1995), and x-ray techniques (Arslan et al., [16]
Cereal grain yield monitors are well developed and experimental methods used by researchers have been commercialized due to the availability of proven combine grain yield monitors. However, up to now limited commercial methods have been developed for non-grain crops mainly because of diverse methods of harvesting and substantial differences between these crops regarding their physical and mechanical properties. Several research projects have been conducted and many investigations are still in progress to develop practical techniques in this area.
Godwin et al (1999) developed a yield mapping system for use in non-grain crops (i.e. roots and forage) using the measurement of mass accumulation rate. The concept was realized by instrumenting a high-sided trailer to record the rate of accumulation of crop mass as the trailer followed the harvester. The location of the trailer was recorded using a differential GPS with a linked data set to log the position and the processed mass information. The mean yield values of sugar beet and potato crops taken from the yield map and from samples measured by batch harvesting were not significantly different [10] Pelletier and Upadhyaya (1999) developed a continuous mass flow-type yield-sensing device equipped with load cells along with a differential global positioning system (DGPS) for mounting on a processing tomato harvester to collect spatially variable yield data in real-time. Their results showed high correlation of 0.997 between load cells output and clean tomato mass flow rate [22] Cotton yield monitor systems have been developed and tested [] 23, 24, 28, 29, 30, 32, 34, 40, 41, 46, 47], and several versions of a cotton yield monitor have come to market. All commercial cotton yield monitors use the principle of optical attenuation using a light-emitter array and a light-detector array mounted opposite to each other on a cotton picker’s pneumatic duct. The light attenuation signal is converted by the data acquisition system to an estimate of the cotton mass flow rate [33] For peanut yield monitoring, development of a load cell-based yield monitor [] 39] and an optical-based yield monitor [35] have been reported.
For yield monitoring and mapping of root crop (i.e. potato, sugar beet, etc.) yields, the following measurement systems have been reported: radiometric [2] load cells in belt conveyors [] 42, 43], image analysis [1] 25], pivoted table with a load cell [27] bounce plate [] 9] and weighing frame with load cells and speed sensors [37] curved impact plate [11] sugar cane yield monitoring the following attempts have been reported: development of hydraulic pressure and flow measurement system [5] construction of load cell-based mass measurement trailer [26] weight scale yield sensor [3] load cell transducers and speed detectors mounted on side conveyor [21] and load cells as a billet weighing instrument set up on the harvester side conveyor just before the sugar cane billets are dropped into an in-field trailer [17] silage and forage crops, investigations were initiated by instrumenting a silage corn harvester with strain gauge-based torque sensors fitted on main blower shaft and main drive shaft of cutter head, feed rolls and front attachment [38] Auernhammer et al. (1995) used a radioactive transmitter and receiver to find a relationship between feed rate changes of dry silage crop and changes in the intensity of radioactive wave received by the detector. Although they found good correlation between these parameters, this technique was banned due to US food industry regulations that prevented food producers from using radioactive waves during food processing [1] et al. (1997) installed an impact plate sensor in spout of a drawn chopper. A deflector was used to guide chopped material toward the impact sensor. To compensate the effect of speed changes of passing material, a radar-type speed sensor was also installed. Results showed a linear relation (R2=0.985) between mass flow rate and output data through the sensor [20]
Wild and Auernhammer (1999) equipped a round baler with strain-gauge load cells installed on the axle and drawbar to prepare a yield map. They conducted tests in stationary and on-the-go modes. The results showed that in stationary mode, the difference between actual mass flow rate and sensor output was only 1% but in on-the-go mode, the difference was 10% due to vibrations of the moving vehicle [44] and Savoie (2000) equipped a pull-type forage harvester with four different types of sensors to estimate mass flow rate and moisture content. Sensors measured feed roll displacement, crop impact force against a hinged plate, the frequency drop of a capacitance controlled oscillator and number of light beam interruptions by forage particles in the spout. When testing in a cornfield, good correlations were obtained between estimated mass-flow-rate and either the feed roll displacement (R2 = 94%) or the crop impact force (R2 = 0.95) [18] Savoie et al. (2002) in a similar investigation to Martel and Savoie (2000) equipped a forage harvester and a high–dump wagon with five types of sensors to measure mass-flow rate. Final results showed that impact force in the spout produced a very good linear correlation with mass–flow rate (R2 = 0.951). Feed roll displacement produced the second best linear correlation with mass-flow rate (R2 = 0.863). Torque at the PTO shaft and at the cutter-head required a moisture correction to improve correlation with mass–flow rate. The capacitance-controlled oscillator was poorly correlated with mass-flow rate but yielded the best correlation with moisture content (R2 = 0.662) [30] Lee et al. (2002) constructed a trailer equipped with load cells that could continuously measure the weight of chopped material. They used a blue-tooth data transmitter to transmit moisture data from a capacitance type moisture sensor mounted in an opening made in the middle of a spout of the silage chopper to a host computer. The masses of the empty and full silage wagon were measured with a platform scale before and after harvesting, and were compared with load cell measurements in the silage yield mapping system. By using GPS data and sensors data, they could prepare a yield map for silage crop [15] and Prosek (2003) developed and evaluated a torque meter and an impact force sensor simultaneously on a three-point linkage type mower-conditioner. They concluded that the impact force sensor was prefered to the torque sensor due to the lower cost and less sensitivity to the kind of crop being harvested [12] et al., 2007 developed a parallel plate capacitance sensor (capacitor) operating at 27 MHz frequency was designed for forage mass determination. Laboratory tests showed that moisture content as well as contact pressure of material placed between the plates influenced the sensor’s output signal. The results showed a strong relationship between the weight of material and the sensor’s signal. They claimed that it is possible to recommend this experimental method for further research and [13] Kumhala et al. (2010) tested a parallel plate capacitive throughput sensor for the purpose of chopped maize throughput measurement. They recognized a non-linear dependence between the sensor output signals and material throughput. They recommended that the material moisture content have to be respected during capacitive throughput sensor calibration.
As mentioned above, many studies have been focused on measuring the impact force of chopped materials impacting a deflector plate in the spout of chopper harvester, but scientist claimed that load cells were highly sensitive to machine vibrations in the field causing errors in measurements. The objective of this research was to investigate the feasibility of using a pivoted plate sensor in the spout of the silage corn chopper for real-time measurement of chopped material throughput in preparation of a site-specific yield map. The main advantage of this new method is installing the mass flow sensor without any major modification in conventional system of the harvester. The other advantage of the suggested method is using a precise potentiometer to measure angular rotation of a pivoted plate that is indirectly related to the momentum of chopped materials impacting the plate instead of measuring the impact force directly by a load cell as mentioned in reviewed literatures.
A throughput flow rate sensor was developed and installed to meter the rate of chopped material leaving the spout of the chopper. The designed mechanism consisted of a pivoted curved plate with a re-coil spring mechanism and a precise rotary potentiometer to measure angular rotation of the curved plate due to the momentum of chopped materials leaving the spout.
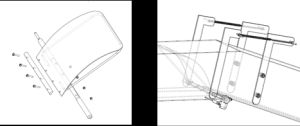
The curved plate was shaped and its main pivot and recoil spring and lever mechanism were machined and fabricated according to the designed drawing [Fig-1] .
To design the proper recoil spring, calculations were performed with the following facts and assumptions:
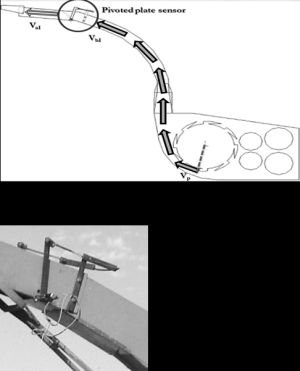
By assuming ground speed of 3.2 km h-1 (0.9 m s-1), the maximum feed rate of chopper in this research was estimated to be about 10 kg s-1 (depends on crop yield, moisture content, swath width and harvester travel speed). By knowing some geometrical and technical specifications of the chopper harvester (CLAAS, JAGUAR62) such as cutter head diameter and rotational speed, coefficient of friction between chopped material and spout inside surface (µ= 0.49), the height and total distance between cutter head and impact plate, the velocity of material before impacting the curved plate sensor (VbI as shown in [Fig-2] was calculated [Eq-2] . To calculate the material velocity after impacting the pivoted plate sensor, the minimum re-uired velocity of materials to reach the platform scale weighing system was considered.
To facilitate the calculations, the following assumptions was considered: a) Chopped materials having a projectile motion and b) Neglecting the effect of drag force (Eq. 4). By knowing the required parameters such as before and after impact velocities and the desired linear displacement of the designed spring at the maximum assumed material feed rate (X= 0.17 m), the proper spring was selected with the specifications given in table1. The curved impact plate and its recoil spring and linkages after installation on the chopper spout are shown in [Fig-3] .
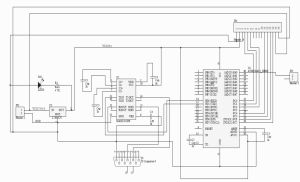
To measure the degree of curved-plate rotation due to impact of chopped material, a precise rotary potentiometer (AB,800FP-POT5, 50kΩ, Mexico) was used. For real-time data recording on a portable computer, an AVR micro controller model ATMEL 16L was used. The output signal of the rotary sensor was connected to ADC port of the micro controller and sent to portable computer via max232 microchip and serial to USB convertor cable, every 0.1 second. A Schematic diagram of the electronic circuit designed for this study is shown in [Fig-4] .
To evaluate accuracy of the mass flow sensor in field conditions, a drawn type wagon was equipped with a sub frame and a precise weighing load cell to continuously weigh the chopped material poured into its storage bag [Fig-5] This wagon was used as a control treatment (accurate reference) in field trials.
In order to calibrate and test the performance of the yield monitoring system, field tests were conducted in the experimental fields of the College of Agriculture, Shiraz University, Shiraz, Iran.
To calibrate the sensor, a part of the test field was prepared with artificially selecting crop densities giving predetermined feed rates of 6, 8 and10 kg s-1 each in 5 replications. These feed rates were controlled by varying the speed of the tractor based on anticipated yield determined by previous sampling in the field. The instant feed rate at time n determined by subtracting accumulated mass of chopped material at time n-1 from the accumulated mass at time n. Finally, a yield map was created for a small plot with three crop rows, each 20 meters long using geographical software Surfer 8.0.
In order to find a calibration curve between the crop feed rate and degree of the curved plate rotation, data must be normally distributed and for a more precise calibration curve, a proper statistical tool should be employed to eliminate the outliers in each treatments. To fulfill these requirements, statistical analyses were conducted using statistical software SPSS 13.0. The normal distribution of the data in each treatment was verified by conducting Kolmogorov-Simirnov normality test. A confidence interval ((1-α)×100 = 95%) around the mean was used as a criterion to eliminate outliers in each feed rate treatment. (Eq.7):
Confidence interval around the mean = Mean of population ± Standard Error of Mean×tα/2 (7)
In order to use the rotation of the pivoted-plate as an indicator of the instantaneous mass flow rate in the field, a calibration curve was drawn on the experimental data after eliminating outliers as shown in [Fig-6] .
To compare the sensor output and instant feed rates of platform scale weighing system statistically, a t-test was used. The results revealed no significant differences between sensor output and platform scale feed rates at 5% confidence level. These two data sets were correlated by correlation coefficient of 0.78 and as an another statistical tool to measure how well the estimated yield by pivoted plate sensor fits actual instantaneous yield measured by the platform scale, root mean squared error (RMSE) was calculated and it was equal to 1.505.
The resulting yield map [Fig-7] shows the mean yield of 5 kg m-2 with standard deviation of 2.0 Kg m-2. The minimum yield was 2.5 kg m-2 and the maximum yield was 10.8 kg m-2.
In this research, the feasibility of using a pivoted plate mass flow sensor for silage corn yield monitoring was investigated. Results of statistical analysis for calibration and field tests showed a highly correlated relation between angular rotation of pivoted plate and instantaneous mass flow rate. More investigations are needed to evaluate this suggested approach at different moisture levels and maturity stages of plant to find a more general calibration equation for mass flow prediction.
[Table-1]
Authors should express their acknowledgment toward Dr. S. M. Nassiri and Professor Jonathan Chaplin for their guidance and helps and also Shiraz University for its technical supports.
[1] Auernhammer H., Demmel M. and Pirro P.J.M. (1995) Yield measurement on self propelled forage harvesters. ASAE Paper No. 95-1757.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[2] Baganz K. (1991) International Symposium on Locating Systems for Agricultural Machines, Godollo, 18.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[3] Benjamin C.E., Mailander M.P. and Price R.R. (2001) Sugar cane yield monitoring system. ASAE 011189.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[4] Campbell R.H., Rawlins S.I. and Shufeng H. (1994) Monitoring methods for potato yield mapping. ASAE 94-1584.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[5] Cox G., Harris H. and Pax R. (1997) Australian Society of Sugar Cane Technologists, 38-43.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[6] Durrence J.S., Perry C.D., Vellidis G., Thomas D.L. and Kvien C.K. (1998) Evaluation of commercially available cotton yield monitors in Georgia field conditions. ASAE 983106.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[7] Durrence J.S., Hamrita U.T.K. and Vellidis G. (1999) Precision Agriculture 1, 301-317.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[8] Ehlert D. (1996) Landtechnik 51(H.1), 20-21.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[9] Ehlert D. (1999) the 2nd European Conference on Precision Agriculture, 797-804.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[10] Godwin R.J., Wheeler P.N., O’Dogherty M.J., Watt C.D. and Richards T. (1999) Computers and Electronics in Agriculture 23, 85-101.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[11] Hennens D., Baert J., Broos B., Ramon H. and De Baerdemaeker J. (2003) Biosystems Engineering 85 (4), 425-436.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[12] Kumhala P. and Prosek V. (2003) Precision Agriculture 4, 413-419.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[13] Kumhála F., KvÃz Z., Kmoch J. and ProÅ¡ek V. (2007) RES. AGR. ENG., 53 (4), 149-154.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[14] Larsson K. (1994) Teknik for Lantbruket, 43, 7.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[15] Lee W.S., Schueller J.K. and Burks T.F. (2002) ASAE Annual International Meeting. 021165.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[16] Loghavi M. and Almaee M. (2009) Agricultural Engineering International: the CIGR Ejournal.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[17] Magalhaes P.S.G. and Cerri D.G.P. (2006) Biosystems Engineering 96 (1), 1-6.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[18] Martel H. and Savoie P. (2000) Can. Agric. Eng. 42,123-129.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[19] Meriyam J.L. and Kraige L.G. (2002) Engineering Mechanics, II: Dynamics. Fifth edition. John Wiley & Sons.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[20] Missoten B., Brooks B., Strubbe G. and De Baerdemaeker J. (1997) The first European conference on Precision Agriculture, Warwick University, 7-10, 529-536.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[21] Pagnano N.B. and Magalhaes P.S.G. (2001) The Third European Conference on Precision Agriculture, 839-843.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[22] Pelletier G. and Upadhyaya S.K. (1999) Computers and Electronics in Agriculture 23, 103-117.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[23] Perry C.D., Vellidis G., Wells N. and Kvien C. (2001) The Beltwide Cotton Conference, ed: D.A. Richter, Memphis, Tenn.: National Cotton Council of America. 328-339.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[24] Perry C.D. and Vellidis G. (2005) Cotton yield monitor instantaneous accuracy during steady-state and step-input conditions. ASAE 051129.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[25] Persson A. (1998) The 1st International Conference on Geospatial Information in Agriculture and Forestry, Ann Arbor, MI, 618-623.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[26] Pierossi M.A. and Hassuani S.J. (1997) Semina´rio Copersucar de Tecnologia Agronoˆmica 7, Piracicaba, Brazil, 263-265.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[27] Rawlins S.L., Campbell G.S., Campbell R.H. and Hess J.R. (1995) The 2nd Intl. Conf. Site-Specific Management for Agricultural Systems.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[28] Roades J.P., Beck A.D. and Searcy S.W. (2000) The Beltwide Cotton Conference, 404-408.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[29] Sassenrath-Cole G.F., Thomson S.J., Williford J.R., Hood K.B., Thomasson J.A., Williams J. and Woodard D. (1999) The Beltwide Cotton Conference, 364-366.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[30] Savoie P., Lemire P. and Thériault R. (2002) Applied Engineering in Agriculture 18(4), 389-397.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[31] Sirvastava A.K., Georing G.E. and Rohrbach R.P. (1993) Engineering Principle of Agricultural Machines. ASAE, 601p.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[32] Sui R., Thomasson J.A., Mehrle R., Dale M., Perry C. and Rains G. (2004) Computers and Electronics in Agriculture 42, 149-160.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[33] Thomasson J.A., Pennington D.A., Pringle H.C., Columbus E.P., Thomson S.J. and Byler R.K. (1999) Applied Engineering in Agriculture 15(1), 11-17.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[34] Thomasson J.A. and Sui R. (2000) The Beltwide Cotton Conference, 408-410.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[35] Thomasson J.A., Sui R., Wright G.C. and Robson A.J. (2006) Applied Engineering in Agriculture 22(6), 809-818.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[36] Upadhyaya S.K. (1999) The Fourth International Conference on Precision Agriculture.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[37] Van Canneyt T. and Verschoore R. (2000) Agricultural Engineering into the Third Millennium, 331-332.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[38] Vansichen R. and De Baerdemaeker J. (1993) Journal of Agricultural Engineering Research, 55, 1-10.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[39] Vellidis G., Perry C.D., Durrence J.S., Thomas D.L., Hill R.W., Kvien C.K., Hamrita T.K. and Rains G. (2001) Transactions of the ASAE 44(4), 775-785.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[40] Vellidis G., Perry C.D., Rains G., Thomas D.L., Wells N. and Kvien C.K. (2003) Applied Engineering in Agriculture 19(3), 259-272.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[41] Wallace T.P. (1999) Computers and Electronics in Agriculture 23, 1-8.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[42] Walter J.D., Backer L.F. and Hofman V.L. (1996) Sugar beet yield monitoring for site-specific farming, ASAE 961022.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[43] Walter J.D. and Backer L.F. (2003) Precision Agriculture 4, 421-31.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[44] Wild K. and Auernhammer H. (1999) Computers and Electronics in Agriculture 23, 119-132.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[45] Wilkerson J.B., Kirby S., Hart W.E. and Womac A.R. (1994) Real-time cotton flow sensor. ASAE 94-1054.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[46] Wilkerson J.B., Moody F.H. and Hart. W.E. (2002) Applied Engineering in Agriculture 18(2), 153-159.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
[47] Wolak F.J., Khalilian A., Dodd R.B., Han Y.J., Keshlkin M., Lippert R.M. and Hair W. (1999) The Belt wide Cotton Conference, 361-364.
» CrossRef » Google Scholar » PubMed » DOAJ » CAS » Scopus
 | Fig. 1- Drawing map of pivoted plate and accessories (lever mechanism, spring and potentiometer) |
 | Fig. 2- Schematic Diagram of velocity changes in chopper chute (1) |
 | Fig 3- |
 | Fig. 4- Schematic diagram of the electronic circuit |
 | Fig. 5- A field test of the sensor using platform scale weighing system |
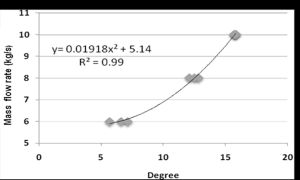 | Fig. 6- Relation of pivoted plate angular rotation and instantaneous mass flow |
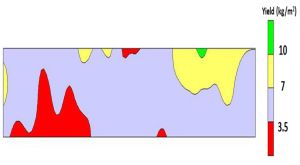 | Fig. 7- A typical silage corn yield map of the test field |
 | Table 1- Nomenclature |
 | Eq 2- Equation 2 to 6 |